Hélice Hamilton
- Principe HYDRAULIQUE
- Réalisation MÉCANIQUE
- Hydraulique : SOUS-VITESSE
- Hydraulique : VITESSE CONSTANTE
- Hydraulique : SUR-VITESSE
- Hydraulique : DRAPEAU
- Hydraulique : DÉVIRAGE DE DRAPEAU
- Hydraulique : REVERSE
- Hydraulique : DÉVIRAGE DE REVERSE
- Hydraulique : POMPE AUXILIAIRE
- Électrique : TÊTE ÉLECTRIQUE (ELECTRIC HEAD)
- Électrique : MOTEUR PAS-À-PAS (STEP MOTOR)
- Électrique : COMMUTATEUR (COMMUTATOR)
- Électrique : FONCTIONNEMENT MOTEUR PAS-À-PAS
- Électrique : PRINCIPES ET SCHÉMA DES COMMANDES
- Électrique : COMMANDES INDIVIDUELLES
- Électrique : COMMANDES SIMULTANÉES
- Électrique : COMMANDES SIMULTANÉES réalisation MÉCANIQUE
- Électrique : COMMANDES SIMULTANÉES - ÉLECTRO-MÉCANIQUE
- Électrique : COMMANDES SIMULTANÉES - FONCTIONNEMENT
- Électrique : COMMANDES SIMULTANÉES - GRAND PAS
- Électrique : COMMANDES SIMULTANÉES - PETIT PAS
- Électrique : COMMANDES SIMULTANÉES - DÉCOLLAGE
- Électrique : SYNCHRONISATION
- Électrique : SYNCHRONISATION - DIFFERENTIAL MOTORS
- Électrique : SYNCHRONISATION - 3% SYN LIMITER (Limiteur)
- Électrique : SYNCHRONISATION - RESYNCHRONISATION
- Électrique : Fonction des relais
- MAINTENANCE MANUAL 43E60
Partie électrique - Commandes Individuelles
Tête électrique (Electric Head)
La tête électrique du régulateur d'hélice (Governor) permet la modification à distance de la compression du ressort du régulateur à masselottes. Elle remplace la commande par câbles des régulateurs classiques. Elle est essentiellement constituée par un moteur électrique particulier (Step Motor), déplaçant par l'intermédiaire d'engrenages une crémaillère prenant appui sur le ressort du régulateur à masselottes. Deux butées mécaniques sont prévues et agissent d'une part, mécaniquement en limitant la course de la crémaillère, et électriquement en établissant une masse sur un circuit électrique. Ces deux butées sont désignées par BUTÉE RPM MAXI & BUTÉE RPM MINI et correspondent aux deux extrémités de le plage de réglage du régulateur.
Au-dessus de la crémaillère se trouve un ressort de contrebalance qui remet le régulateur approximativement au régime de croisière en cas d'interruption de la liaison mécanique entre la crémaillère et le « step motor ».
Step motor (Moteur pas à pas)

Le step motor (moteur pas à pas) est un moteur électrique particulier alimenté par des impulsions de courant continu, produites par un dispositif spécifique : le commutateur, â partir du réseau de bord, courant continu 28 V.
Il est constitué par un stator à trois enroulements branchés en triangle à l'intérieur duquel tourne le rotor constitué par un aimant permanent.
Ce rotor se place suivant la résultante des champs élémentaires créé par les trois enroulements. En changeant successivement le sens du courant dans les enroulements, on parvient à faire varier la direction du champ résultant par étapes (step motor) de 30°. Le sens du courant dans les enroulements est fixé par la position du commutateur.
Commutateur

Les commutateurs situés dans le boîtier synchroniseur fournissent les impulsions nécessaires au fonctionnement du step motor. Chaque commutateur est constitué par trois jeux de contacts actionnés par un arbre à trois cames entraîné par un moteur électrique.
Les trois cames sont espacées de 120° et actionnent chacune un contact qui se ferme pendant 30° environ de la rotation de l'arbre à cames.
Chaque contact est successivement relié au « + », isolé, relié au « - ». Les trois contacts sont reliés à travers des relais aux trois sommets de l'enroulement triangle du step motor.

Représentation dans les schémas
Fonctionnement du step motor
Une rotation du commutateur de 360° engendre une révolution complète du step motor.
Représentation des douze positions possibles (0° à 330°)

Avec les sommations vectorielles des champs magnétiques des trois enroulements
Examinons en détail le fonctionnement des trois premières positions
Position 1 - 0°. Dans cette position, on a :
- le point "A" (relié au contact "A" du commutateur) négatif.
- le point "B" (relié eu contact "B" du commutateur) positif.
- le point "C" (relié au contact "C" du commutateur) négatif.
Le point "B" est à un potentiel de 28V par rapport aux points "A" et "C". Deux courants circulent donc, de "B" vers "A" et de "B" vers "C" dans les bras 1 et 2 de l'enroulement triangle du step motor. Les trois bras de l'enroulement étant identiques, ces deux courants sont égaux et créent deux champs "H" qui se composent pour donner un champ résultant de valeur 1,73H. Les points "A" et "C" étant au même potentiel, aucun courant ne circule dans le bras "3"
Position 2 - 30°
- le point "A" est négatif.
- le point "B" est positif.
- le point "C" est isolé.
Le point "B" est positif par rapport au point "A". Deux courants circulent donc de "B" vers "A', l'un à travers le bras "1" de l'enroulement triangle, l'autre à travers les deux bras 2 et 3 en série.
Le courant dans le bras "1" y crée un champ de valeur H comme en position 1. Le courant circulant dans les bras "2" et "3" en série a une valeur égale à la moitié de celui qui circule dans le bras "1" Il crée dans les deux bras "2" et "3" deux champs de valeur 1/2H. Le champ résultant est égal à 1,5 H et sa direction s'est déplacée de 30° par rapport à la position précédente.
Position 3 - 60°
- le point "A" est négatif.
- le point "B" est positif.
- le point "C" est positif.
Les points "B" et "C" sont à un potentiel de 28V par rapport au point "A". Deux courants circulent donc de "B" vers "A" et de "C" vers "A" dans les bras "1" et "3" de l'enroulement triangle et y créent deux champs de valeur H. Le champ résultant a pour valeur 1,73H et sa direction s'est déplacée de 30° par rapport à la position 2 et de 60° par rapport à la position 1. On voit donc que le champ résultant a tourné du même angle que le commutateur.
De l'examen du tableau ci-dessus, il ressort que la rotation complète du rotor du step motor s'effectue en 12 étapes : 6 étapes avec champ résultant à signaux forts et les 6 autres à signaux plus faibles.
Inversion du sens de rotation
Pour inverser le sens de rotation du champ (donc du rotor), on peut
- soit changer de sens la successions des différentes positions des figures ci-dessus, en inversant le sens de rotation du commutateur (ceci revient à lire les figures ci-dessus de bas en haut).
- soit inverser deux conducteurs entre le commutateur et le step motor (câbles allant aux points A et B par exemple). On verra plus loin que les deux méthodes sont utilisées.
Le seul moyen d'agir sur le pas des pales est de faire tourner, dans un sens ou dans l'autre, le moteur pas-à-pas (Step Motor) de la tête électrique (Governor Head ou Electric Head) de chaque régulateur d'hélice (Governor) pour contrebalancer la force centrifuge des masselottes et ainsi agir sur le tiroir de distribution (Pilot Valve) qui aiguillera la pression d'huile vers la face avant ou arrière du piston du dôme d'hélice.
Commandes Individuelles - Commandes Simultanées - Synchronisation
La partie essentielle des circuits électriques est constituée par une ensemble appelé SYNCHRONISEUR(*) situé à l'avant droit de la soute avant. Les commandes du pas des hélices sont situées au centre au pupitre du mécanicien navigant et sont constituées de :

- Un sélecteur principal à trois positions :
- 'AUTO 1' - Synchronisation avec moteur n°1 comme pilote
- 'MANUAL' - Fonctionnement manuel
- 'AUTO 2' - Synchronisation avec moteur n°2 comme pilote
- Un bouton poussoir 'RESYNCHRONIZE' utilisé lorsque l'écart de vitesse entre le moteur pilote et un des moteurs esclaves se produit. Ne sert QUE pour le fonctionnement en resynchronisation.
- Quatre sélecteurs de commande individuelle - ces sélecteurs ont trois positions, les deux positions extrêmes à contact momentané sont repérées 'INCREASE RPM' (augmentation de vitesse) et 'DECREASE' (diminution de vitesse) et correspondent à une action sur le moteur pas-à-pas de la tête électrique du régulateur amenant le régime d'équilibre de celui-ci à une valeur plus ou moins élevée (dans les limites de la plage de régulation). La position centrale est la position de repos.
- Quatre voyants ambres (un par hélice) s'allument lorsque la tête électrique du régulateur de l'hélice correspondante se trouve en butée 'RPM MAXI' ou 'RPM MINI'.
- Quatre voyants bleus (un par hélice) s'allument quand l'hélice correspondante arrive 4 à 6° avant la position 'REVERSE'.
- Un levier de commande simultanée 'MASTER LEVER CONTROL' situé à gauche du boîtier de commande et actionnant la commande TELEFLEX agissant sur le dispositif de commande simultanée du synchroniseur en conjonction avec le levier de commande du pilote.
(*)Le SYNCHRONISEUR comprend essentiellement :
- dix-neuf relais
- un TOGGLE MOTOR entraînant quatre commutateurs COMMUTATORS SWITCHES (Commandes Individuelles)
- un MASTER MOTOR entraînant un commutator MASTER MOTOR COMMUTATOR SWITCH (Commandes Simultanées)
- trois systèmes différentiels de vitesse électromécaniques entraînant chacun un commutator DIFFERENTIAL MOTOR COMMUTATOR SWITCH (Synchronisation)
Schéma électrique global des boîtiers de commande et de synchronisation

Un clic sur le schéma pour l'obtenir en grande taille (1280 x 1014) - Un schéma en 2048 x 1623 est disponible ici
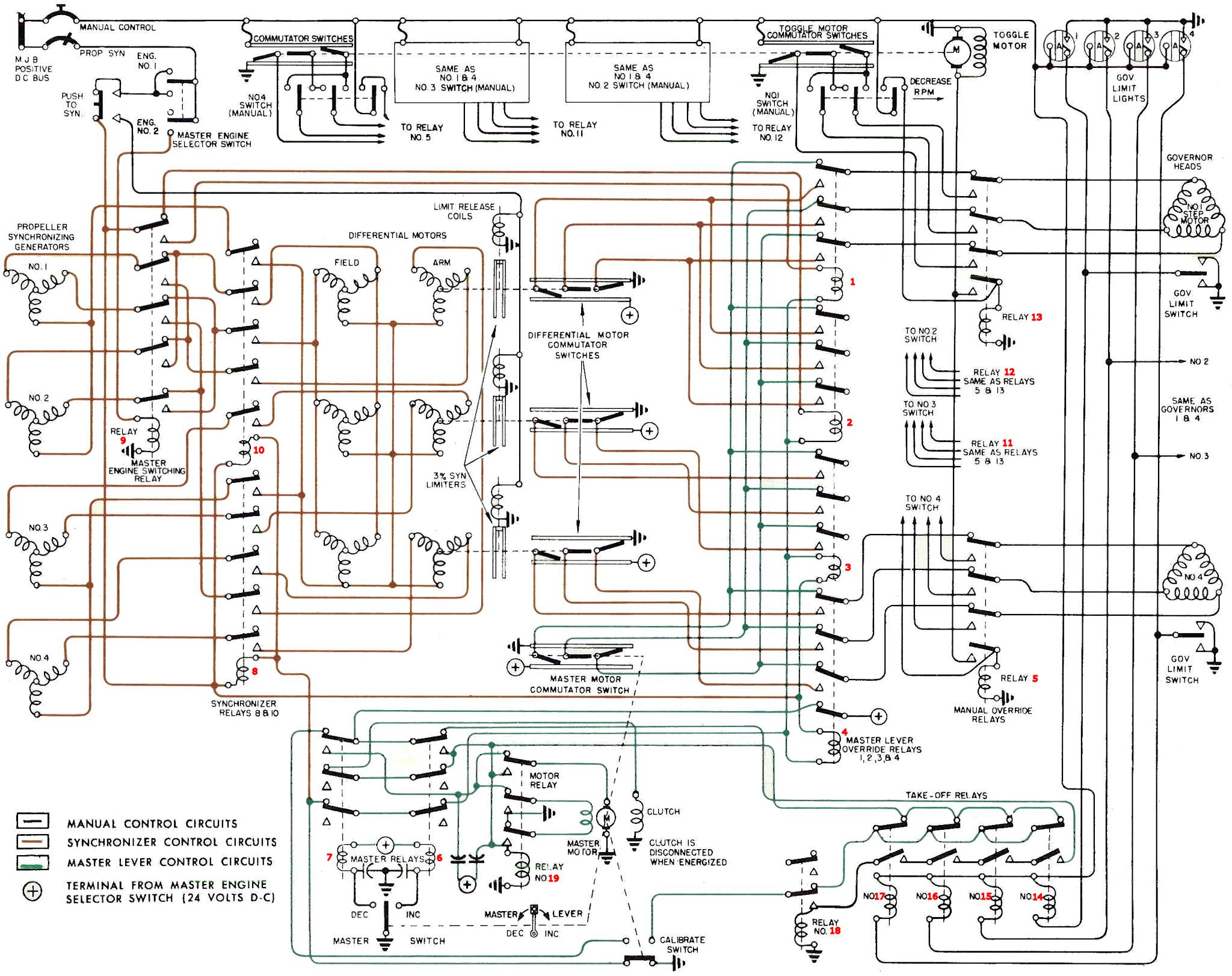{kind=link}
COMMANDE INDIVIDUELLE (Ou commande manuelle)
Cette commande est prioritaire et peut toujours être utilisée quelles que soient les positions des autres commandes
GÉNÉRALITÉS : Le système de commande individuelle comprend essentiellement un moteur à courant continu 'TOGGLE MOTOR' (En haut et à droite du schéma global) entraînant mécaniquement un groupe de 4 commutateurs (Un pour chaque hélice). Lorsqu'une hélice est commandée individuellement, le moteur est alimenté et le commutateur correspondant cette hélice est relié à la tête électrique de son régulateur. Ce moteur n'ayant qu'un seul sens de rotation, l'inversion du sens de rotation du moteur pas-à-pas de la tête électrique de chaque hélice est obtenu le bouton de commande manuelle qui inverse deux fils entre le commutateur et le régulateur.
Exemple de commande individuelle pour le moteur n°1 - Commande « petit-pas »

Le sélecteur de commande individuelle de l'hélice 1 est maintenu sur la position 'INC RPM'. Ceci :
- Excite le relais 13 qui isole la tête électrique du régulateur d'hélice N°1 des circuits synchronisation ou commande simultanée et la connecte sur le commutateur correspondant.
- Alimente le moteur de commande individuelle 'TOGGLE MOTOR' par le quatrième contact du relais 13, ce qui entraîne la rotation des quatre commutateurs de commande individuelle.
Le commutateur de commande individuelle de l'hélice N°1 alimente, dans le sens augmentation de régime, le moteur pas-à-pas du régulateur N°1.
Les trois autres commutateurs de commande individuelle fournissent également des signaux, mais ceux-ci ne peuvent pas être envoyés sur les régulateurs correspondants, les relais 5, 11 et 12 n'étant pas excités.
Exemple de commande individuelle pour le moteur n°1 - Commande « grand-pas »
Le sélecteur de commande individuelle de l'hélice 1 est maintenu sur la position 'DEC RPM'.
Le fonctionnement est similaire à celui décrit ci-dessus, mais, le moteur de commande individuelle 'TOOGLE MOTOR' n'ayant qu'un sens de rotation, l'inversion de sens de rotation du moteur pas-à-pas de la tête électrique est obtenu par l'inversion de deux des fils reliant le commutateur et le moteur pas-à-pas. Cette inversion est effectuée par le sélecteur de commande manuelle 'DEC RPM' 'INC RPM'.