Hélice Hamilton
- Principe HYDRAULIQUE
- Réalisation MÉCANIQUE
- Hydraulique : SOUS-VITESSE
- Hydraulique : VITESSE CONSTANTE
- Hydraulique : SUR-VITESSE
- Hydraulique : DRAPEAU
- Hydraulique : DÉVIRAGE DE DRAPEAU
- Hydraulique : REVERSE
- Hydraulique : DÉVIRAGE DE REVERSE
- Hydraulique : POMPE AUXILIAIRE
- Électrique : TÊTE ÉLECTRIQUE (ELECTRIC HEAD)
- Électrique : MOTEUR PAS-À-PAS (STEP MOTOR)
- Électrique : COMMUTATEUR (COMMUTATOR)
- Électrique : FONCTIONNEMENT MOTEUR PAS-À-PAS
- Électrique : PRINCIPES ET SCHÉMA DES COMMANDES
- Électrique : COMMANDES INDIVIDUELLES
- Électrique : COMMANDES SIMULTANÉES
- Électrique : COMMANDES SIMULTANÉES réalisation MÉCANIQUE
- Électrique : COMMANDES SIMULTANÉES - ÉLECTRO-MÉCANIQUE
- Électrique : COMMANDES SIMULTANÉES - FONCTIONNEMENT
- Électrique : COMMANDES SIMULTANÉES - GRAND PAS
- Électrique : COMMANDES SIMULTANÉES - PETIT PAS
- Électrique : COMMANDES SIMULTANÉES - DÉCOLLAGE
- Électrique : SYNCHRONISATION
- Électrique : SYNCHRONISATION - DIFFERENTIAL MOTORS
- Électrique : SYNCHRONISATION - 3% SYN LIMITER (Limiteur)
- Électrique : SYNCHRONISATION - RESYNCHRONISATION
- Électrique : Fonction des relais
- MAINTENANCE MANUAL 43E60
Partie électrique - Commandes Simultanées
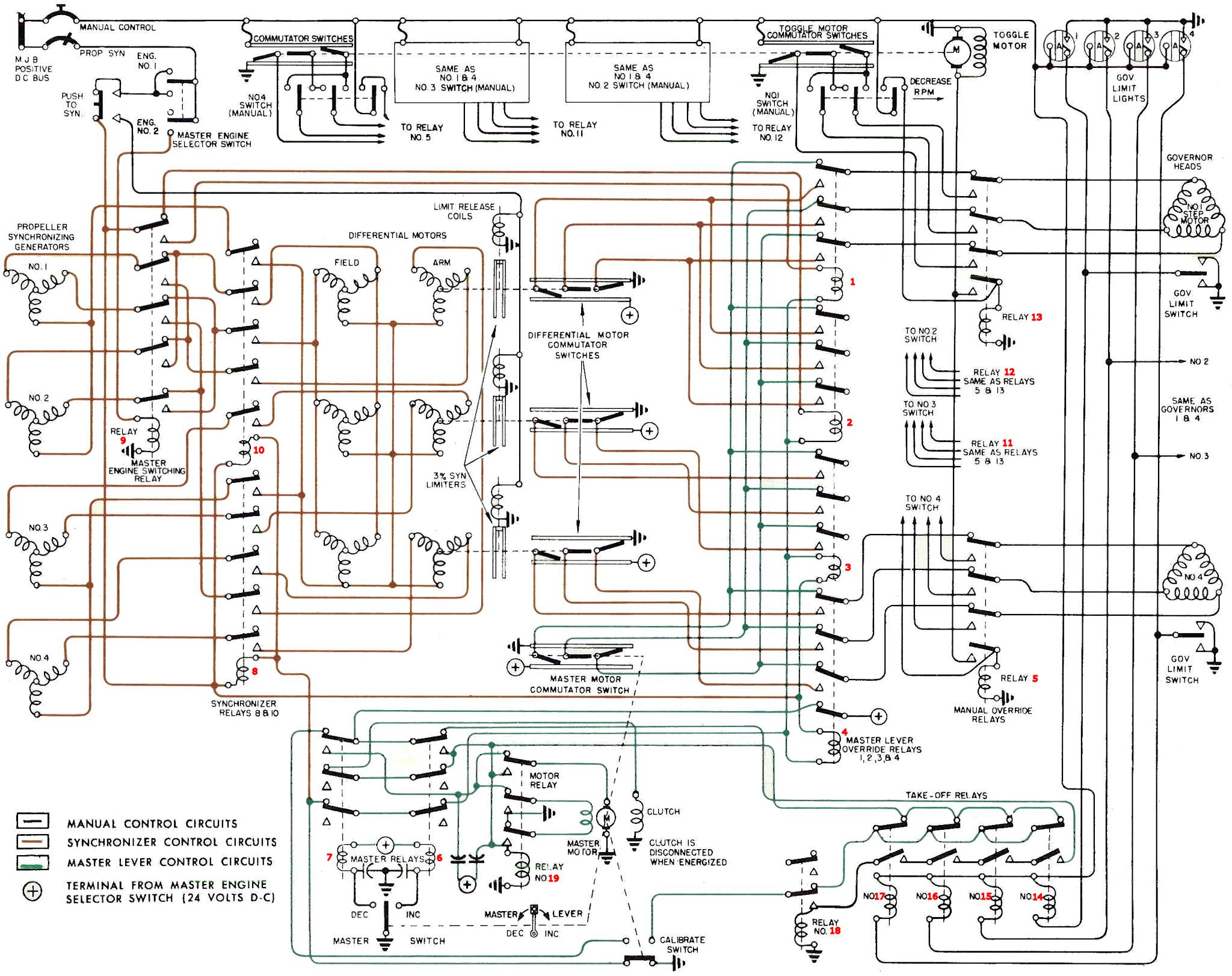
Schéma électrique global des boîtiers de commande et de synchronisation

Un clic sur le schéma pour l'obtenir en grande taille (1280 x 1014)
Un schéma en 2048 x 1623 est disponible ici
{kind=link}
COMMANDE SIMULTANÉE
Le système de commande simultanée est essentiellement constitué par un moteur électrique 'MASTER MOTOR' entraînant un commutateur 'MASTER MOTOR COMMUTATOR SWITCH' dont les impulsions sont simultanément envoyées sur les têtes électriques des quatre régulateurs d'hélice. Un système d'asservissement rend la course angulaire du 'MASTER MOTOR' - donc le nombre d'impulsions envoyées sur les têtes électriques - proportionnelle à l'écart angulaire appliqué par le levier de commande 'MASTER LEVER' du pilote ou du mécanicien navigant.
Commande simultanée - Schéma électrique

Extrait partie basse au milieu du schéma électrique global
Pour bien comprendre le fonctionnement du système de commande simultanée, il est indispensable d'en « voir » la réalisation mécanique.
Commande simultanée - Synoptique mécanique


Principe mécanique
Les pignons C et E transmettent les mouvements de l'arbre A aux deux contacts G et H.
Le pignon C porte une butée réglable D qui assure la fermeture du contact de décollage 'CALIBRATE SWITCH' en position extrême 'RPM Maxi'.
En position normale, les contacts de commande G et H sont maintenus par le ressort X contre la butée F, solidaire du pignon E.
Les disques d'asservissement I sont solidaires et isolés électriquement de l'arbre K. Ils sont reliés directement à l'excitation des relais 6 et 7 par l'intermédiaire des contacts glissants J et portent chacun un contact d'asservissement Z1 et Z2.
Un embrayage électromécanique c 'CLUTCH' désolidarise le pignon N du plateau a - donc de l'arbre d - lorsqu'il est alimenté
Principe électromécanique
En position normale 'neutre', les contacts G et H sont centrés de part et d'autre des contacts d'asservissement Z1 et Z2 et les relais 6 et 7 sont désexcités.
Supposons le levier de commande simultanée déplacé dans le sens 'INC. RPM' (petit pas) par l'intermédiaire de l'arbre A et des pignons C et E, la butée F est entraînée et écarte le contact G des contacts d'asservissement. Sous l'action du ressort X, le contact H vient buter sur le contact Z2 fermant le circuit d'excitation du relais 6 à la masse.
Le master motor se met en route et entraîne le commutateur de commande simultanée par l'intermédiaire des pignons U, T, S, R et les disques d'asservissement dans le sens convenable pour ramener le système au neutre, par l'intermédiaire des pignons Q, P, O, H, M et L.
Quand le système est ramoné au neutre, le contact entre H et Z2 se coupe, désexcitant le relais 6 et le master motor s'arrête. Le master motor est muni d'un électro frein qui bloque l'induit quand le moteur n'est pas alimenté.
Condition DÉCOLLAGE
Dans la condition DÉCOLLAGE, un embrayage électro magnétique c permet au master motor de tourner sans entraîner le système d'asservissement. Quand l'électro aimant n'est pas excité, le ressort b rend le pignon H solidaire du plateau a monté sur le même arbre d que M et que l'armature V. En condition DÉCOLLAGE, l'électro aimant c excité attire et bloque l'armature V et écarte le plateau a du disque N qui tourne alors fou sur l'arbre d. Le master motor n'entraîne plus alors QUE le commutateur par les pignons U, T, S, R.
La position "DÉCOLLAGE" est obtenue en poussant à fond le levier de commande simultanée dans le sens 'INC. RPM' (petit pas) ; ceci amène la butée D en contact sur un micro interrupteur de décollage "CALIBRATE SWITCH" mettant le circuit en position convenable pour cette opération.
FONCTIONNEMENT
Le sélecteur principal doit être sur l'une des deux positions 'AUTO 1' ou 'AUTO 2'. Le système de commande simultanée ne fonctionne pas avec le sélecteur en position 'MANUAL'. Les sélecteurs de commande individuelle sont en position 'OFF'.
(Rappel : Les commandes manuelles sont prioritaires sur toutes autres commandes).
Commande simultanée Grand Pas (diminution de régime)
Le levier de commande simultanée, sur le pupitre mécanicien navigant ou sur le pylône du pilote, est tiré dans le sens diminution de régime (DEC. RPM). Ceci établit la masse du relais 7 par contact de commande H et le contact d'asservissement Z2 'diminution régime'.
Le relais 7 se ferme provoquant :
- coupure de la masse des bobines des relais 1, 2, 3 et 4 qui s'ouvrent, branchant les quatre têtes électriques des régulateurs d'hélice sur le commutateur de commande simultanée à travers les relais 5, 11, 12 et 13 et isolant les têtes électriques du circuit de synchronisation.
- alimentation du master motor dans le sens 'DEC.RPM' (+ pris sur le 4ème contact du relais 4 - non excité).
- coupure du circuit de l'embrayage électro magnétique.
Le master motor entraîne le commutateur (dont les signaux sont simultanément envoyés sur les quatre têtes électriques des régulateurs) et le système d'asservissement ; quand celui-ci recale les contacts au neutre, le relais 7 n'est plus excité, ce qui coupe l'alimentation du master motor et remet le circuit en position 'SYNCHRONISATION'.
Commande simultanée Petit Pas (augmentation du régime)
Le levier de commande simultanée est poussé dans le sens augmentation de pas (INC. RPM). Ceci établit la masse du relais 6 par les contacts de commande G et d'asservissement Z1 'augmentation régime'.
Le relais 6 se ferme, provoquant :
- coupure de la masse des bobines des relais 1, 2, 3 et 4 qui s'ouvrent, branchant les quatre têtes électriques des régulateurs d'hélice sur le commutateur de commande simultanée à travers les relais 5, 11, 12 et 13 et isolant les têtes électriques du circuit de synchronisation.
- alimentation de la bobine du relais 19, inversant l'excitation du master motor et alimentation du motor dans le sens 'INC.RPM' (+ pris sur le 4ème contact du relais 4 non excité).
- coupure du circuit de l'embrayage électro-magnétique.
Le master motor entraîne le commutateur (dont les signaux sont simultanément envoyés sur les quatre têtes électriques des régulateurs) et le système d'asservissement. Quand celui-ci recale les contacts au neutre le relais 6 est désexcité, ce qui coupe l'alimentation du master motor et replace le circuit en position 'SYNCHRONISATION'.
Il n'y a pas de relation directe entre la position du levier de commande simultanée et le pas des hélices.
Par exemple : le levier étant avance au maximum, supposons que par la commande individuelle de chaque hélice, on ramène les quatre moteurs vers 1300 tours. Si alors on retarde le levier de commande simultanée au minimum, les hélices atteindront leur RPM minimum avant même que le levier ait atteint la moitié de son trajet normal total.
Une autre caractéristique de fonctionnement est très importante : quand l'inverseur principal sur le piédestal est en position 'MANUAL', seuls les circuits de commande individuelle sont sous tension. Les systèmes de synchronisation et de commande simultanée sont hors circuit. Si l'on manoœuvre le levier de commande simultanée, rien ne peut arriver en ce qui concerne un changement de pas des hélices, mais la commande TELEFLEX aura actionné les contacts de commande du système d'asservissement. Si l'on place maintenant le sélecteur principal sur l'une des positions 'AUTO 1' ou 'AUTO 2', le circuit de commande simultanée va être alimenté et le master motor va tourner jusqu'à ce que le système d'asservissement soit ramené au neutre. Il y aura donc changement de pas des quatre hélices, quoiqu'on ait plus manœuvré le levier de commande simultanée.
Commande simultanée fonction « DÉCOLLAGE »
Le sélecteur principal doit être sur l'une des deux positions 'AUTO 1' ou 'AUTO 2'. Les sélecteurs de commande individuelle sont en position 'OFF'.
(Rappel : Les commandes manuelles sont prioritaires sur toutes autres commandes).

Extrait du schéma électrique global - Fonction décollage
La position DÉCOLLAGE est obtenue en poussant à fond le levier de commande simultanée dans le sens 'INC. RPM', ce qui amènera les régulateurs électriques d'hélices en butée 'RPM MAXI'. Les actions de la fonction simultanée DÉCOLLAGE peuvent être décomposées en trois phases
Fonction DÉCOLLAGE : 1ère phase
Le levier de commande simultanée, poussé à fond dans le sens 'INC. RPM' :
- établit le contact entre les contacts d'asservissement et de commande petit pas du dispositif de commande simultanée, excite le relais 6 et le master motor tourne comme vu en commande simultanée - augmentation de régime.
- actionne l'interrupteur 'CALIBRATE SWITCH' (Par la butée réglable D du pignon C) qui coupe la masse des relais 8 et 10 qui coupent l'alimentation des moteurs différentiels mécaniques ; la masse des relais 1, 2, 3, 4 est également coupée par le 'CALIBRATE SWITCH' en aval du relais 6.
Fonction DÉCOLLAGE : 2ème phase
Les contacts d'asservissement du dispositif de commande simultanée étant ramenés au neutre, le relais 6 s'ouvre. Les relais 1, 2, 3 et 4 restent ouverts - leur circuit d'excitation étant isolé de la masse par le 'CALIBRATE SWITCH'.
Les quatre régulateurs n'étant pas obligatoirement tous en position 'RPM MAXI', le master motor continue à être alimenté par un circuit partant du sélecteur principal ('MASTER ENGINE SELECTOR SWITCH'), le plus (+) du synchroniseur, le 4ème contact du relais 4, les contacts repos du relais 7, le 'CALIBRATE SWITCH', le contact repos du relais 18 et les quatre contacts supérieurs branchés en parallèle, des relais de décollage 14, 15, 16 et 17.
Ce circuit alimente le relais 19 et le master motor et aussi, par les contacts repos des relais 6 et 7, l'enroulement de l'embrayage électromagnétique.
Le master motor continue donc à tourner dans le sens augmentation du régime, sans entraîner les disques d'asservissement, puisque l'embrayage électromagnétique est excité.
NOTE : Rôle de l'embrayage électromagnétique :
Malgré l'ouverture du relais 6, le 'MASTER MOTOR' est toujours alimenté dans le cas où les têtes électriques ne sont pas en butée RPM MAXI. A ce moment, si l'embrayage électromagnétique n'existait pas, les contacts d'asservissement ramenés au neutre primitivement (lors de l'ouverture du relais 6), surpasseraient cette position et les contacts d'asservissement grand pas se ferment, établissant une masse qui fermerait le relais 7. A cet instant, le 'MASTER MOTOR' ne serait plus alimenté via les contacts repos du relais 7, le 'CALIBRATE SWITCH', les contacts repos des relais 18, 17, 16, 15 ou 14, mais par un contact travail du relais 7 et cette fois, tournerait dans l'autre sens. Le master tournant en sens inverse, ramènerait les contacts d'asservissement au neutre, le relais 7 retomberait, le 'MASTER MOTOR' a son sens de rotation à nouveau inversé. En conséquence, le 'MASTER MOTOR' oscillerait autour de ces positions aussi longtemps que le 'CALIBRATE SWITCH serait fermé.
Fonction DÉCOLLAGE : 3ème phase
Les régulateurs électriques arrivent en butée 'RPM. MAXI' et les interrupteurs de fin de course ('GOV LIMIT SWITCH') des têtes électriques de régulateurs mettent à la masse les excitations des relais de décollage correspondants (relais 14, 15, 16, 17).
Quand les quatre relais de décollage sont excités, l'alimentation du 'MASTER MOTOR' et de l'embrayage électromagnétique est coupée par l'ouverture des contacts supérieurs et par le fermeture du relais 18 excité à travers les contacts inférieurs en série.
Les quatre régulateurs d'hélice sont donc en butée 'RPM MAXI', le 'MASTER MOTOR' et l'embrayage électromagnétique ne sont plus alimentés et les relais 14, 15, 16, 17, 18 sont excités. Le circuit est en position DÉCOLLAGE. Les lampes ambres sur le boîtier sont allumées.
NOTES : - Si l'un des régulateurs d'hélice est écarté de la position 'RPM MAXI' (par commande individuelle par exemple), l'ouverture du relais de décollage correspondant n'entraînera pas une nouvelle mise en route du MASTER MOTOR ; le relais 18 est maintenant excité directement à travers le CALIBRATE SWITCH et son propre contact inférieur (Auto-maintient). En sorte que, la correction terminée et le sélecteur de commande individuelle ramené en position centrale 'OFF', le moteur restera au régime corrigé et ne sera pas ramené au régime de décollage.
On voit l'importance du fonctionnement de l'interrupteur de décollage 'CALIBRATE SWITCH' ; aussi lors du réglage de la commande TELEFLEX, il est plus important de s'assurer du fonctionnement de cet interrupteur que de s'évertuer à ce que le levier de commande simultanée soit parfaitement à fond de course avant au pupitre.